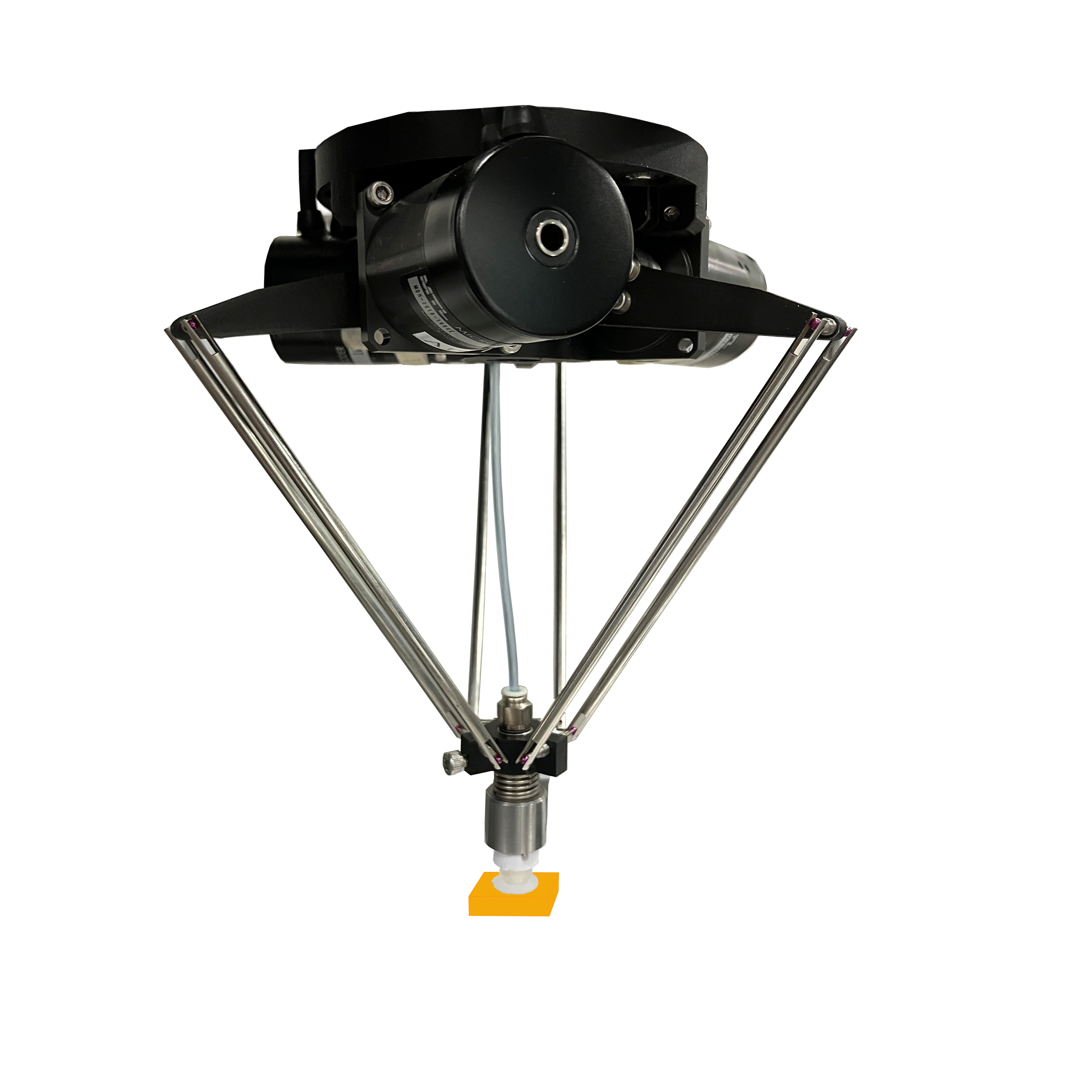
超小型高速パラレルリンクロボット
時計で培った創造技術と
デジタルの融合
主な特徴
- 小さな部品のトレー詰めなどに使用できる小型ロボットを開発
- θ軸とトラッキング機構を装備
- 微細部品を数多く取り扱ってきたメーカーの技術力ならではの内製ロボット
- 超小型なので微細部品に最適
- コンベア上での微細部品の高速Pick&Placeに最適
主な仕様
| 機能 | ワークをトレーに整列 |
|---|---|
| ロボット外形 ※1 | 高さ 134mm |
| 稼働範囲 | Φ150mm x 30mm |
| 最大設備能力 ※2 | 1秒/個 |
| 繰返し制度 | ±10~20μm |
| 対応可能ワークサイズ | Φ0.8mm~ |
※1 参考寸法です。
※2 ワークの種類や状態により装置の動作条件(画像検査・ロボット速度等)を変更した場合、最大能力に達しない場合があります。


